ARMO: Autoregressive Rigging for Multi-Category Objects
* Indicates Equal Contribution † Indicates Corresponding Author
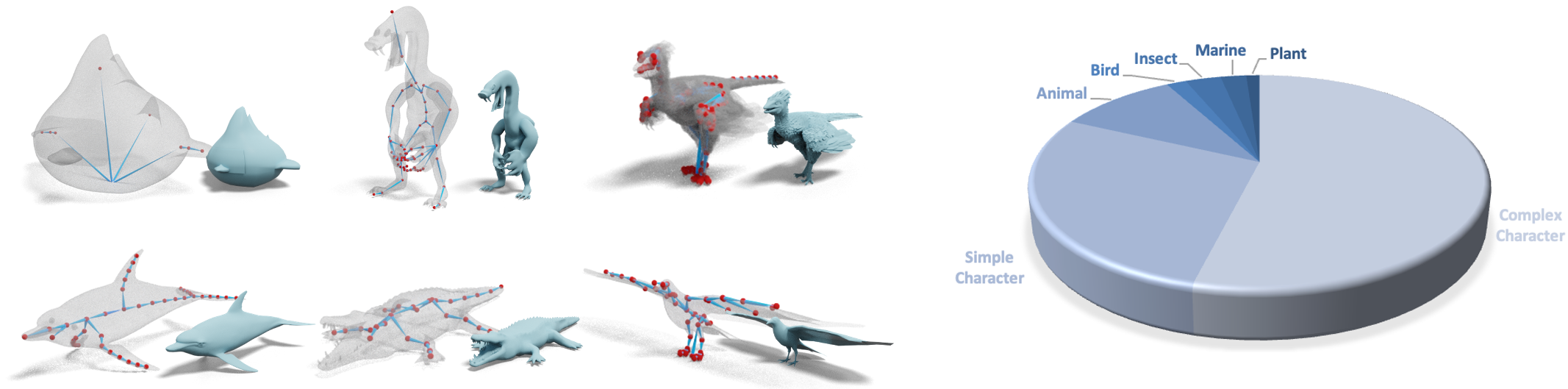
We introduce OmniRig, a comprehensive and large-scale dataset with detailed rigging annotations. Our dataset is constructed from three key sources: ModelResource, ObjaverseXL, and publicly available free data collected from the internet. In total, OmniRig comprises 79,499 meshes, each accompanied by detailed rigging information.
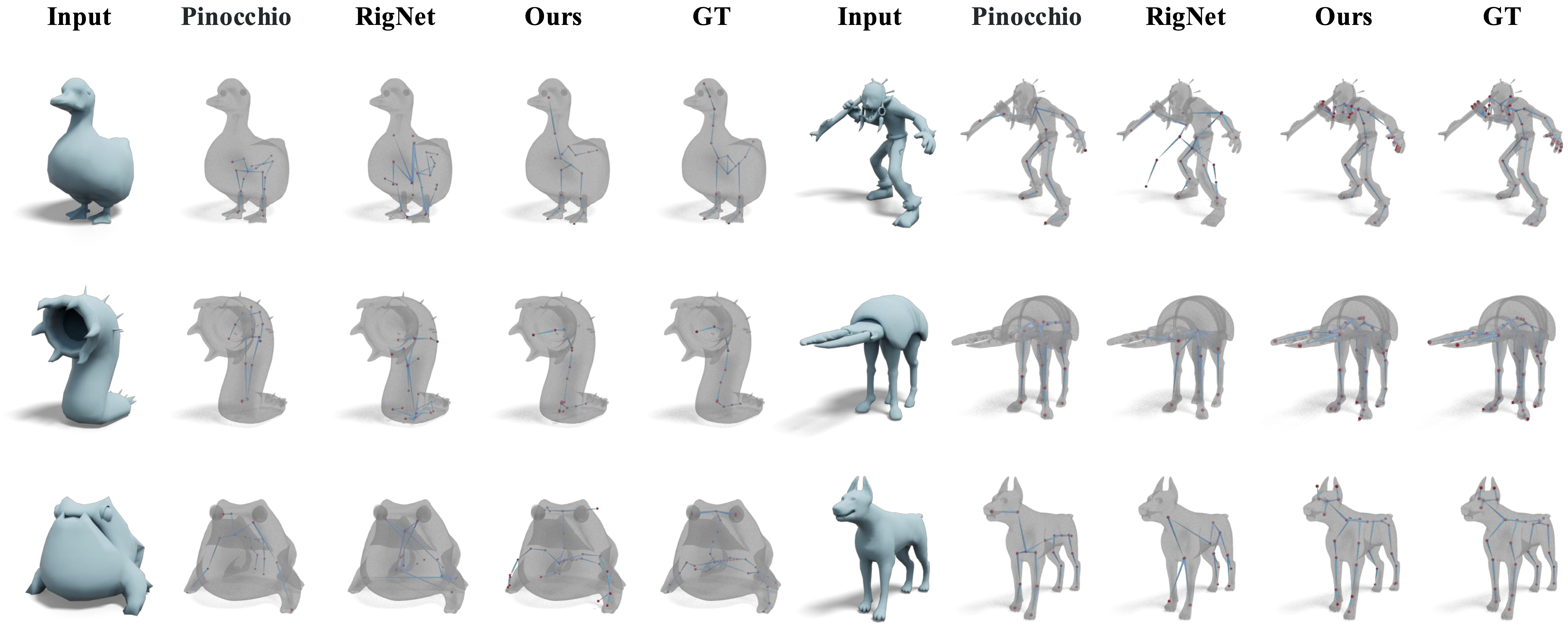
We compare our method with other skeleton generation methods on OmniRig. Our method can generate reasonable skeleton results for diverse object categories and inputs with complex poses.
@article{sun2025armo,
title={ARMO: Autoregressive Rigging for Multi-Category Objects},
author={Sun, Mingze and Mao, Shiwei and Chen, Keyi and Chen, Yurun and Lu, Shunlin and Wang, Jingbo and Dong, Junting and Huang, Ruqi},
journal={arXiv preprint arXiv:2503.20663},
year={2025}
}